고급 초기환경 설정 (STM32CubeIDE 활용)
이번 포스트에서는 Empty Project 말고 STM32CubeIDE에서 제공하는 기능을 이용해서 개발을 진행하는 고급 환경구성 방법을 다룬다.
🎯 고급 환경구성 개요
이제 Empty Project 말고 STM32CubeIDE에서 제공하는 것을 이용해서 개발을 진행한다.
이를 통해 더욱 체계적이고 효율적인 개발 환경을 구축할 수 있다.
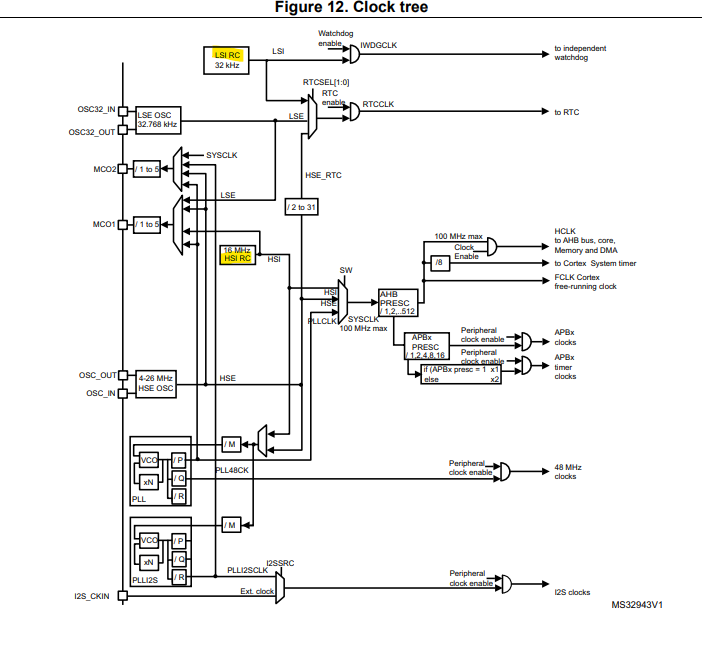
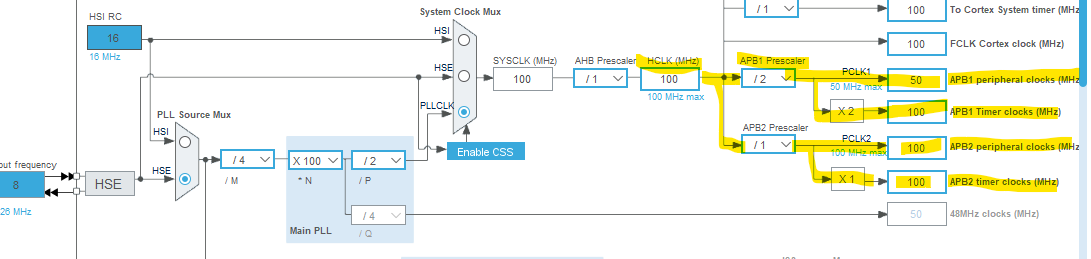
⚙️ 1. RCC 설정
HSE와 HSI 비교

HSI vs HSE:
- HSI: 16MHz로 고정 (내부 클럭)
- HSE: 외부 클럭 (8MHz, 우리가 사용하는 보드 외부 클럭은 8MHz)
설정 방법:
- HSE를 사용하도록 설정
- HSE를 8MHz로 설정
PLL 설정과 클럭 분배
해당 clock이 PLL 회로로 들어가 클럭을 100MHz로 뻥튀기한다.
HCLK이 APB Prescaler를 거쳐 Peripheral Clock이 된다:
- Timer는 100MHz로 설정된다
🔧 2. Debugging 설정
Serial Wire 설정
Debugging용 Wire를 Serial Wire로 설정한다.

Serial Wire Debug의 장점:
- JTAG보다 적은 핀 사용
- 효율적인 디버깅 인터페이스
- STM32에서 표준으로 사용
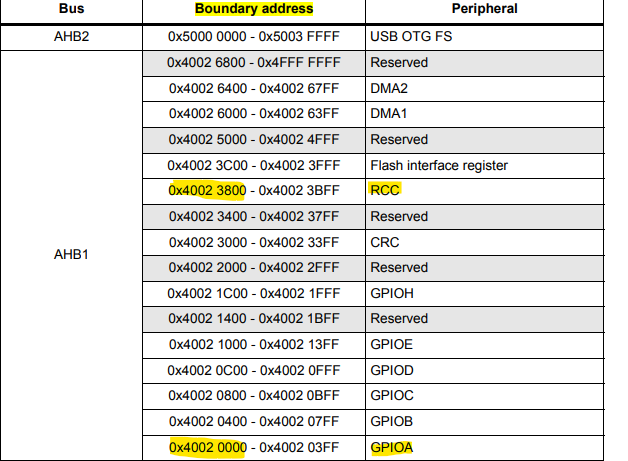
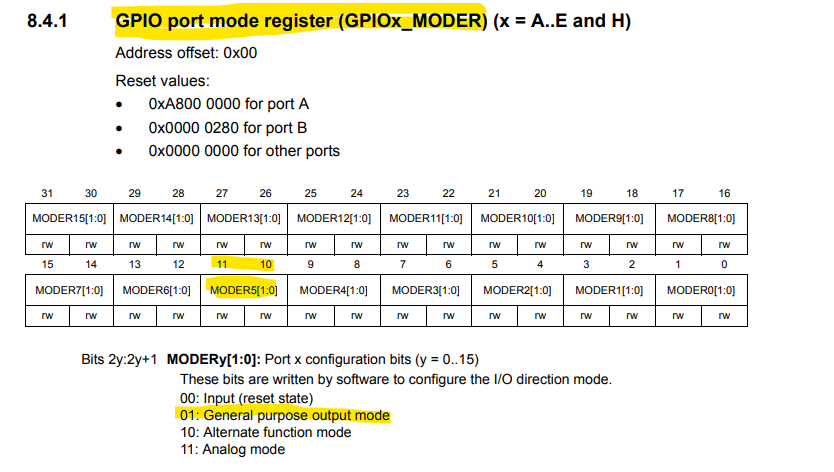
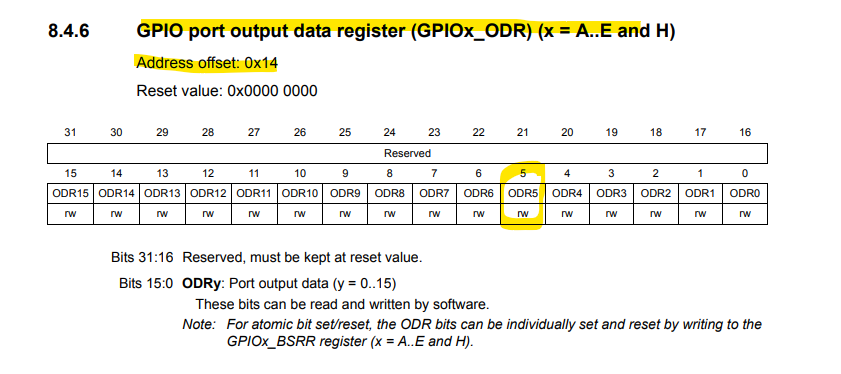
📍 3. GPIO 설정
GPIO 핀 구성
다음과 같이 GPIO를 설정한다:

설정 완료 확인
설정이 완료된 모습:

GPIO 설정 요점:
- 사용할 핀들을 적절한 모드로 설정
- Input/Output/AF/Analog 모드 선택
- Pull-up/Pull-down 설정
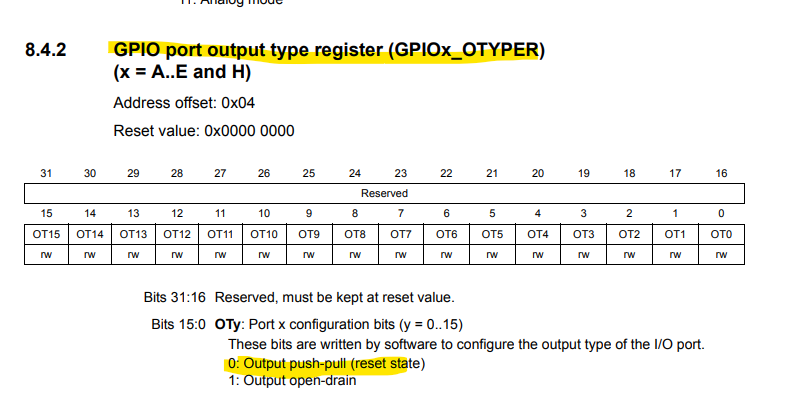
- Output 타입 및 속도 설정
⏰ 4. Timer 설정
Timer 기본 설정
다음과 같이 Timer를 설정한다:

Timer 설정 목적:
- 정확한 타이밍 제어
- 주기적인 인터럽트 발생
- PWM 신호 생성
NVIC 설정
Timer Interrupt를 활성화하기 위해 NVIC를 활성화한다:

NVIC(Nested Vectored Interrupt Controller):
- 인터럽트 우선순위 관리
- 중첩 인터럽트 처리
- 효율적인 인터럽트 핸들링
📁 5. Project Manager 설정
Code Generator 설정
Code generator에서 **”Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral”**를 선택한다:

이 설정의 장점:
- 관련 파일이 각각 따로 만들어져 보기 편하다
- 주변장치별로 파일이 분리되어 유지보수 용이
- 코드 구조가 명확해짐
🚀 6. 프로젝트 생성
최종 생성
다 했으면 톱니바퀴 아이콘을 눌러서 프로젝트를 생성한다:

생성 과정:
- 설정 검증
- 코드 생성
- 프로젝트 파일 구성
- 초기화 코드 생성
🛠️ 컴파일 환경 구성
STM32CubeCLT 설치
컴파일 하기 위한 프로그램 설치 (STM32CubeCLT_1.18.0):

컴파일러 확인
컴파일러 (arm-none-eabi-gcc):

링커 (arm-none-eabi-ld):

설치 확인
CMD에서 STM32와 Version 확인:

📊 생성된 프로젝트 구조
파일 구조
STM32CubeIDE가 생성하는 표준 프로젝트 구조:
Project/
├── Core/
│ ├── Inc/
│ │ ├── main.h
│ │ ├── stm32f4xx_hal_conf.h
│ │ ├── stm32f4xx_it.h
│ │ └── gpio.h (설정에 따라 생성)
│ └── Src/
│ ├── main.c
│ ├── stm32f4xx_hal_msp.c
│ ├── stm32f4xx_it.c
│ ├── system_stm32f4xx.c
│ └── gpio.c (설정에 따라 생성)
├── Drivers/
│ ├── CMSIS/
│ └── STM32F4xx_HAL_Driver/
└── Middlewares/ (필요시)주요 파일 설명
main.c:
- 메인 애플리케이션 로직
- 사용자 코드 영역 제공
stm32f4xx_hal_msp.c:
- MSP(MCU Support Package) 초기화
- 저수준 하드웨어 초기화
stm32f4xx_it.c:
- 인터럽트 핸들러 구현
- 시스템 인터럽트와 사용자 인터럽트
gpio.c/gpio.h:
- GPIO 초기화 코드
- 주변장치별 파일 분리 시 생성
💡 고급 환경구성의 장점
1. 자동 코드 생성
- 초기화 코드 자동 생성
- 에러 없는 기본 설정
- 표준 HAL 라이브러리 활용
2. 시각적 설정
- GUI를 통한 직관적 설정
- 실시간 설정 확인
- 핀 충돌 자동 감지
3. 유지보수성
- 설정 변경이 용이
- 코드 재생성 가능
- 표준화된 구조
4. 호환성
- ST 공식 지원
- 다양한 STM32 시리즈 지원
- 업데이트와 버그 수정
📋 정리
이번 포스트에서는 STM32CubeIDE를 활용한 고급 초기환경 설정을 다뤘다:
- RCC 설정: HSE 사용과 PLL을 통한 클럭 설정
- 디버깅 설정: Serial Wire Debug 인터페이스 설정
- GPIO 설정: 시각적 인터페이스를 통한 핀 설정
- Timer 설정: Timer와 NVIC 인터럽트 설정
- 프로젝트 관리: 주변장치별 파일 분리 설정
- 컴파일 환경: STM32CubeCLT 도구 설치
핵심 장점:
- 자동화된 코드 생성
- 시각적이고 직관적인 설정
- 에러 없는 기본 구성
- 표준화된 프로젝트 구조
이제 초기환경 세팅의 전 과정을 완료했다. 다음 단계에서는 이를 바탕으로 더 복잡한 기능들을 구현할 수 있다.
이전 포스트: 6. SW Stack과 모듈화
🎉 초기환경 세팅 시리즈 완료!
축하한다! Cortex-M 초기환경 세팅의 모든 과정을 완료했다. 이제 다음 단계로 넘어가 더 고급 기능들을 구현해보자.