바텀부터 LED 제어하기
이번 포스트에서는 STM32CubeIDE의 HAL 라이브러리를 사용하지 않고, 레지스터를 직접 제어하여 LED를 제어하는 방법을 알아본다.
🎯 개발 목표
아래 순서대로 LED 제어 프로그램을 구현한다:
#include <stdint.h>
int main(void)
{
/*1. Enable clock access to GPIOA */
/*2. Set PA5 as output pin*/
while(1){
/*3. Set PA5 high*/
/*4. Set PA5 low*/
}
}⚡ 1단계: RCC 클럭 설정
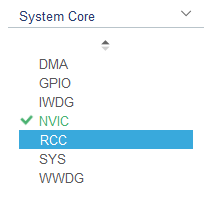
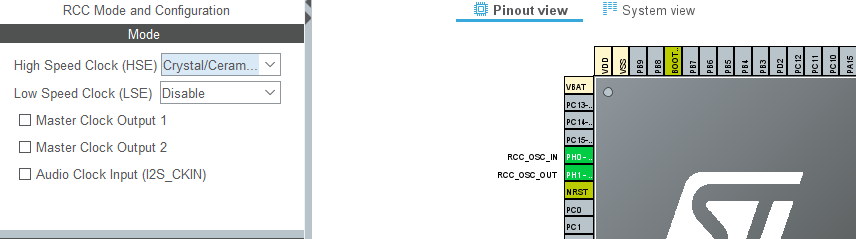
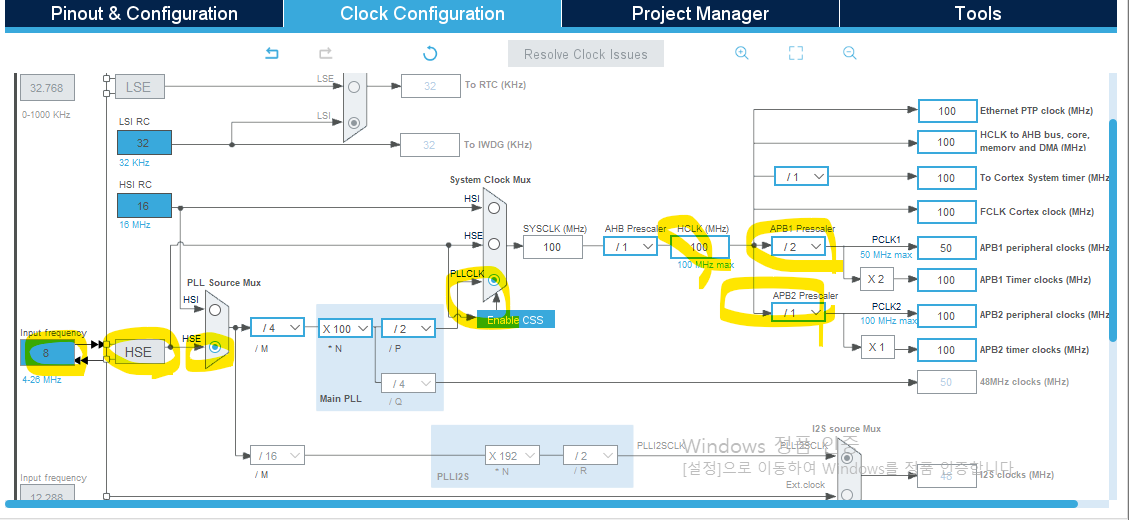
Clock Tree 이해
STM32에서는 RCC가 GPIOA에 클럭을 공급해야 한다.
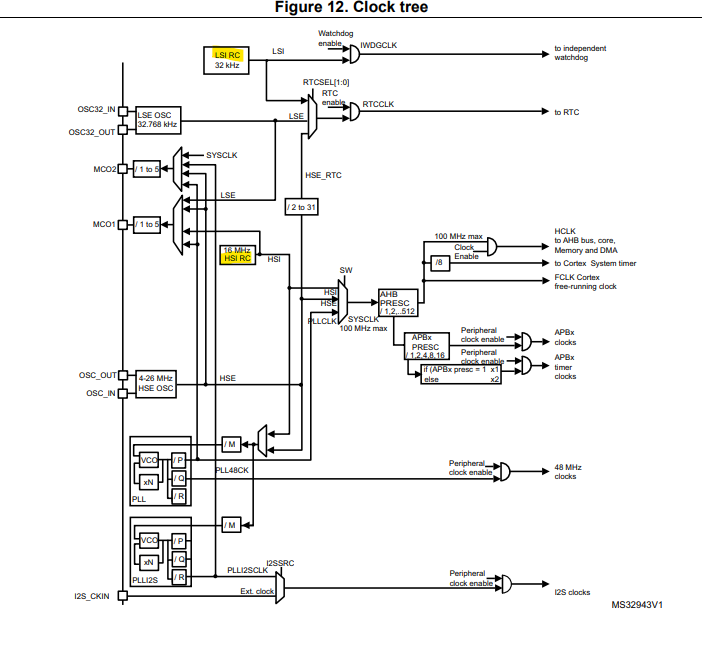
클럭 종류:
내부 CLOCK
- HSI (High Speed Internal Clock): System 동작용 CLOCK
- LSI (Low Speed Internal Clock): RTC 내부 CLOCK
- 특징: 온도나 주변환경에 따라 클럭이 변할 수 있음
외부 CLOCK
- 내부 클럭에 비해 정확한 클럭 제공
- 안정적인 동작 보장
RCC 레지스터 설정
메모리 맵:
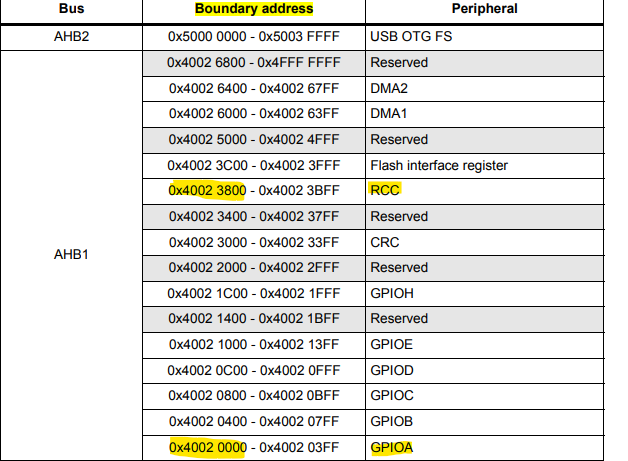
- RCC Base Address:
0x4002 3800 - AHB1ENR Offset:
0x30 - 최종 주소:
0x4002 3830
GPIOAEN을 1로 설정하면 GPIOA에 클럭이 공급된다.
/*1. Enable clock access to GPIOA */
*(volatile uint32_t *)0x40023830 |= (1U << 0); 📍 2단계: GPIO 레지스터 설정
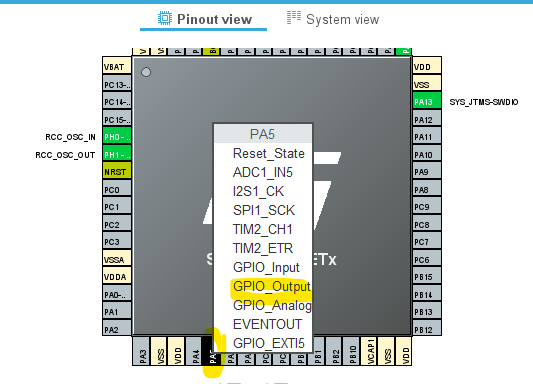
GPIO Mode Register 설정
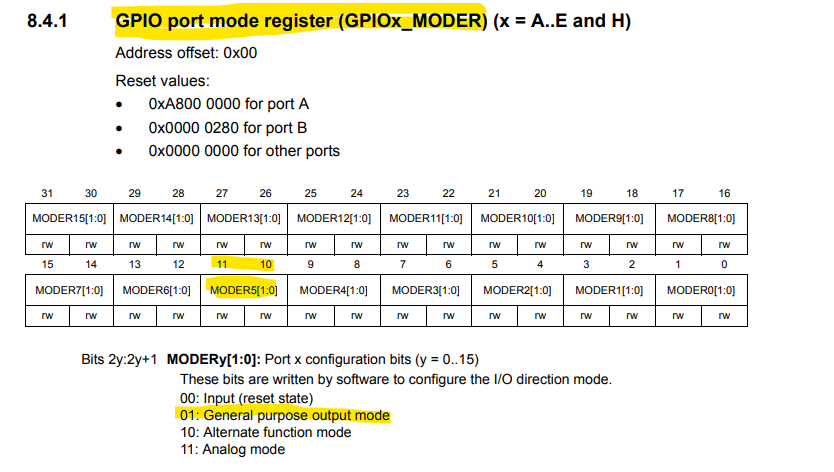
설정 값:
- Register Address:
0x4002 0000 - 설정 값:
MODER[11:10] = 2'b01(Output mode)
/*2. Set PA5 as output pin*/
*(volatile uint32_t *)0x40020000 |= (1U << 10); // Set bit 10
*(volatile uint32_t *)0x40020000 &= ~(1U << 11); // Clear bit 11참고:
1U는unsigned int를 의미한다.
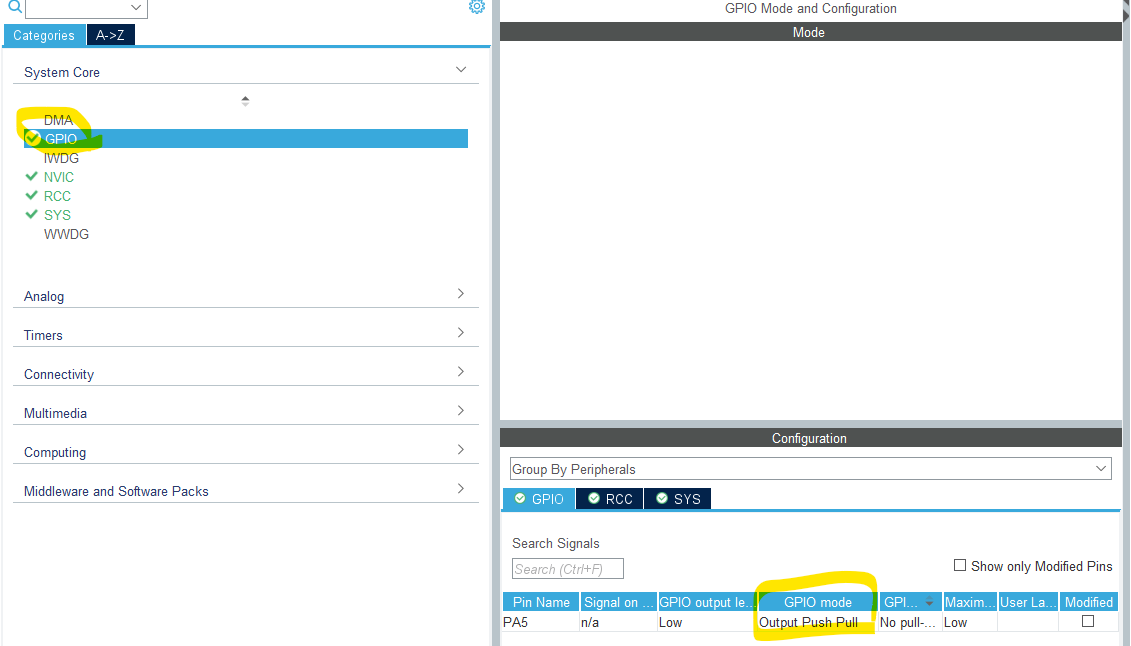
GPIO Output Type Register
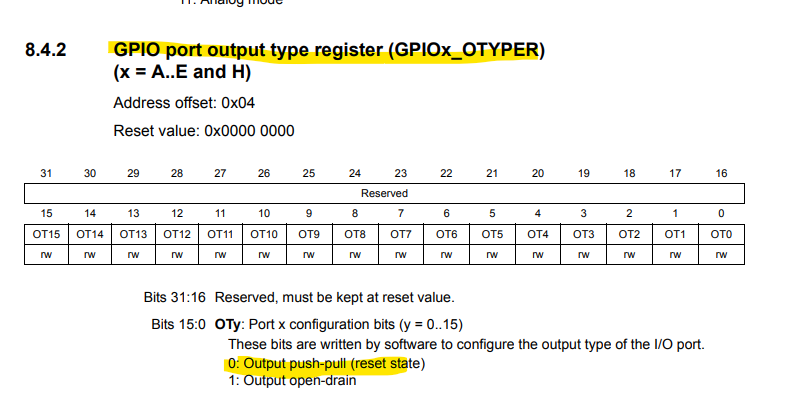
기본값이 Push-Pull이므로 별도 설정이 필요하지 않다.
🔄 3단계: LED Toggle 구현
GPIO Output Data Register (ODR)를 사용하여 LED를 제어한다.
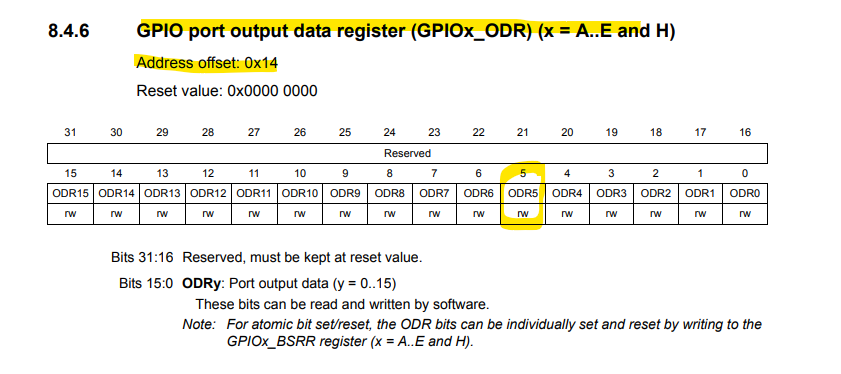
// LED ON
*(volatile uint32_t *)0x40020014 |= (1U << 5);
for(int i=0; i<100000; i++){}
// LED OFF
*(volatile uint32_t *)0x40020014 &= ~(1U << 5);
for(int i=0; i<100000; i++){}📝 4단계: 전체 코드
#include <stdint.h>
int main(void)
{
/*1. Enable clock access to GPIOA */
*(volatile uint32_t *)0x40023830 |= (1U << 0); // RCC AHB1ENR
/*2. Set PA5 as output pin */
*(volatile uint32_t *)0x40020000 |= (1U << 10);// GPIOA_MODER output mode
*(volatile uint32_t *)0x40020000 &= ~(1U << 11);// GPIOA_MODER output mode
while(1)
{
/*3. Set PA5 high */
*(volatile uint32_t *)0x40020014 |= (1U <<5);
for(int i = 0; i<100000; i++){}
/*4. Set PA5 low */
*(volatile uint32_t *)0x40020014 &= ~(1U <<5);
for(int i = 0; i<100000; i++){}
}
}🔧 5단계: 코드 개선 - Define 활용
하드코딩된 주소를 매크로로 정의하여 가독성을 높인다:
#include <stdint.h>
#define RCC_AHB1ENR *(volatile uint32_t *)0x40023830
#define GPIOA_MODER *(volatile uint32_t *)0x40020000
#define GPIOA_ODR *(volatile uint32_t *)0x40020014
void delay();
int main(void)
{
/*1. Enable clock access to GPIOA */
RCC_AHB1ENR |= (1U << 0);
/*2. Set PA5 as output pin */
GPIOA_MODER |= (1U << 10);
GPIOA_MODER &= ~(1U << 11);
while(1)
{
/*3. Set PA5 high */
GPIOA_ODR |= (1U <<5);
delay();
/*4. Set PA5 low */
GPIOA_ODR &= ~(1U <<5);
delay();
}
}
void delay(){
for(int i = 0; i<100000; i++){}
}🏗️ 6단계: 범용적 설계를 위한 베이스 주소 정의
모든 GPIO에 적용할 수 있도록 범용적으로 설계한다:
#define PERIPH_BASE (0x40000000UL)
#define APB1PERIPH_OFFSET (0x00000UL)
#define APB2PERIPH_OFFSET (0x10000UL)
#define AHB1PERIPH_OFFSET (0x20000UL)
#define APB1PERIPH_BASE (PERIPH_BASE + APB1PERIPH_OFFSET)
#define APB2PERIPH_BASE (PERIPH_BASE + APB2PERIPH_OFFSET)
#define AHB1PERIPH_BASE (PERIPH_BASE + AHB1PERIPH_OFFSET)
#define GPIOA_OFFSET (0x0000UL)
#define GPIOB_OFFSET (0x0400UL)
#define GPIOC_OFFSET (0x0800UL)
#define GPIOD_OFFSET (0x0C00UL)
#define RCC_OFFSET (0x3800UL)
#define GPIOA_BASE (AHB1PERIPH_BASE + GPIOA_OFFSET)
#define GPIOB_BASE (AHB1PERIPH_BASE + GPIOB_OFFSET)
#define GPIOC_BASE (AHB1PERIPH_BASE + GPIOC_OFFSET)
#define GPIOD_BASE (AHB1PERIPH_BASE + GPIOD_OFFSET)
#define RCC_BASE (AHB1PERIPH_BASE + RCC_OFFSET)💡 주요 개념 정리
volatile 키워드의 중요성
*(volatile uint32_t *)0x40023830 |= (1U << 0);volatile을 사용하는 이유:
- 컴파일러 최적화 방지
- 메모리 맵드 레지스터는 하드웨어에 의해 값이 변경될 수 있음
- 매번 메모리에서 값을 읽어와야 함을 보장
비트 연산의 활용
비트 설정 (Set bit):
register |= (1U << bit_position); // 해당 비트를 1로 설정비트 클리어 (Clear bit):
register &= ~(1U << bit_position); // 해당 비트를 0으로 설정비트 토글 (Toggle bit):
register ^= (1U << bit_position); // 해당 비트를 반전🧪 테스트 및 검증
예상 동작
- 초기화: RCC에서 GPIOA 클럭 활성화
- 설정: PA5 핀을 Output 모드로 설정
- 동작: LED가 약 0.1초 간격으로 깜박임
디버깅 팁
1. 클럭 설정 확인
// RCC AHB1ENR 레지스터 값 확인
uint32_t rcc_value = *(volatile uint32_t *)0x40023830;
// GPIOA 클럭이 활성화되었는지 확인 (bit 0이 1인지)2. GPIO 모드 확인
// GPIOA MODER 레지스터 값 확인
uint32_t moder_value = *(volatile uint32_t *)0x40020000;
// PA5가 output 모드로 설정되었는지 확인 (bit 10=1, bit 11=0)📋 정리
이번 포스트에서는 레지스터 직접 제어를 통한 LED 제어 방법을 다뤘다:
- RCC 설정: GPIOA 클럭 활성화
- GPIO 설정: PA5를 Output 모드로 설정
- LED 제어: ODR 레지스터를 통한 ON/OFF 제어
- 코드 개선: Define을 활용한 가독성 향상
- 범용 설계: 베이스 주소를 활용한 확장 가능한 구조
다음 포스트에서는 구조체를 활용하여 더욱 체계적인 코드 구조를 만들어보겠다.
이전 포스트: 3. 개발 환경 구성
다음 포스트: 5. 코드 개선 과정